照相机的成像变换

 |
|  108 |
108 |  0
0



原标题:照相机的成像变换
原文来自:CSDN 原文链接:https://blog.csdn.net/h763247747/article/details/100880129
照相机的成像变换过程可以分为3步:世界坐标系——>相机坐标系——>图像坐标系——>像素坐标系
景物从世界坐标系转换到相机坐标系需要使用到刚体变换(物体不发生变形,对一个几何物体做旋转或平移)


刚体变换如下图所示:

变换的数学表达式为:

简化:

其中,代表相机坐标系,
代表世界坐标系,
矩阵代表旋转变换,向量
代表平移。
称为相机的外参数,与相机无关。
旋转变换由3种变换组成:绕 x 轴旋转,绕 y 轴旋转和绕 z 轴旋转,用公式表示为:
其中分别表示绕 x 轴旋转,绕 y 轴旋转和绕 z 轴旋转的旋转矩阵。

此变换通过小孔成像实现,其原理如下图所示:

简化其投影过程,

已知位于相机坐标系的一个点, 投影到图像的点
,由相似三角形:

可得:
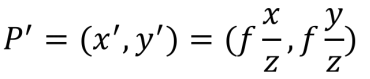
用矩阵表示:
下方图像标注了两种坐标系:
表示图像坐标系,其坐标是连续的;
代表像素坐标系,其坐标只能是大于零的整数,中心像素点的坐标为
,
每一个像素点的长宽为:dx, dy, 即为感光芯片上像素的实际大小。

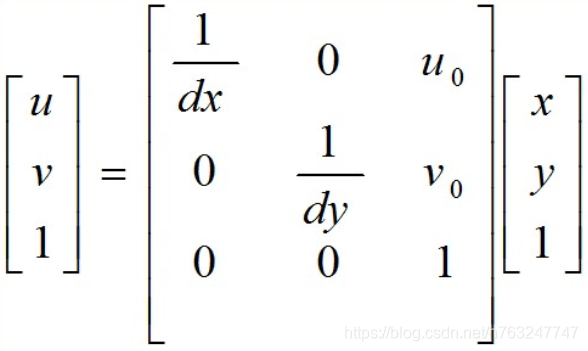
从图像坐标系到像素坐标系的变换公式为:

用矩阵表示:
综合3和4两部分,隐去图像坐标系,直接求取从相机坐标系到像素坐标系的变换矩阵
为了去掉z,转换为其次矩阵
简化:
其中
K 为相机的矫正矩阵(calibration matrix)
如果算入图像的倾斜度K为:
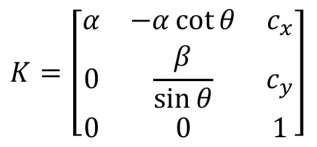
这里的cx,cy即为u0, v0
由2和5部分的分析,可得:

简化:

M 为一个3*4的矩阵,11个未知参数,其中
5个未知参数来自内参矩阵(intrinsic matrix)
3个来自外参旋转
3个来自外参平移
免责声明:本文来自互联网新闻客户端自媒体,不代表本网的观点和立场。
合作及投稿邮箱:E-mail:editor@tusaishared.com
热门资源

Python 爬虫(二)...
所谓爬虫就是模拟客户端发送网络请求,获取网络响...

TensorFlow从1到2...
原文第四篇中,我们介绍了官方的入门案例MNIST,功...

TensorFlow从1到2...
“回归”这个词,既是Regression算法的名称,也代表...

机器学习中的熵、...
熵 (entropy) 这一词最初来源于热力学。1948年,克...

TensorFlow2.0(10...
前面的博客中我们说过,在加载数据和预处理数据时...


智能在线
400-630-6780

聆听.建议反馈
E-mail: support@tusaishared.com

 资源分类
资源分类


